La méthode présentée ici est décrite dans le livre « Hands-on, Manual for Cinematographer » de David Samuelson. Elle a été principalement utilisée dans les années 80 par les cinéastes américains et reste aujourd’hui une des méthode les plus couramment utilisée dans les outils de calcul. La variante présentée ici est a utiliser si on angule les caméras au tournage. Si l’on désire travailler sans angulation, se référer à la page « Méthode Parallèle traditionnelle« .
Cette méthode est disponible dans l’application iphone/ipod Stereographer.
Principe
La méthode se déroule en deux temps:
1 Calcul de l’entraxe en fonction de la distance du plan stéréo, de la distance des fonds ou de la distance du 1er plan (si l’ensemble du sujet est en jaillissement).
On obtient ainsi une profondeur de relief possible autour du plan stéréo. (Si par analogie, on compare la distance du plan stéréo à une distance de mise au point, la profondeur de relief serait comparable à la profondeur de champ).
2 Calcule de l’angle à appliquer afin de réaligner le plan stéréo en fonction de l’entraxe choisie. Anguler les caméras a pour conséquence de ré-aligner le plan stéréo à la distance désirée. La profondeur de relief restera identique mais « glissera » le long de l’axe de prise de vue.
Avantages et inconvénients de la méthode
Avantages:
- Prise en compte de l’ensemble des paramètres (distance focal, taille capteur, largeur écran,…)
- Méthode maximisant la profondeur sans faire diverger les fonds.
- Pas de réalignement nécessaire en post-production.
Inconvénients:
- Utilisable uniquement avec un 3D-rig permettant de faire converger les caméras avec précision.
- L’angulation peut déformer l’espace reproduit (courbure du plan stéréo). En savoir plus…
- L’angulation peut compliquer les travaux de compositing .
Démonstration et formule
Profondeur de relief
On veut, pour une entraxe donnée et un plan stéréo désirée, connaître la distance maximum des fonds (Far) ou minimum pour l’objet le plus proche (Near) . L’espace entre Far et Near est appelé profondeur de relief et devra contenir tous les éléments filmés (au-delà, la convergence n’est plus possible). La notion de profondeur de relief peut-être comparée à la profondeur de champ lorsque l’on parle de mise au point.
Rappel : Z (décalage sur l’écran de projection) = M * (2 * f * tangα – f * t /p)
plus d’explications…
Si on imagine deux points, respectivement un point au premier plan (N) et un point au lointain (F), on peut remarquer que la différence de parallaxe des deux points (N et F) sur l’écran de projection est toujours la même quelque soit l’angulation choisie, à savoir :
Z(N)-Z(F) = M * f * t * (1/N – 1/F)
Exemple en image ci-dessous:
On peut donc définir, en fonction de la distance du plan stéréo désiré et de l’entraxe choisie la profondeur de relief maximum.
Les formules intègrent les variables suivantes :
M : facteur de magnification (taille support prise de vue / taille écran)
F : focale
z1 : décalage négatif maximum de deux points homologues en projection pour jaillissement (définit l’effet spatial)
z2 : décalage maximum de deux points homologues en projection pour les fonds (en principe 6.5cm)
p : distance de la fenêtre stéréo désirée.
Formule pour calculer la distance min du 1er plan : 1 / ((1/p+z1/(M * f * t)))
Formule pour calculer la distance max des fonds : 1 / ((1/p)-z2/(M * f * t))
En isolant t, on calcule la distance entraxe en fonction de tous les autres paramètres. En principe c’est la 1ère formule (qui prend en compte la distance max des fonds) qui sera utilisée. Mais dans le cas particulier du plan stéréo confondu aux fonds, on utilisera la formule prenant en compte le 1er plan (afin d’éviter une division par zéro).
Angulation (réalignement du plan-écran)
L’angulation permet de réaligner le plan écran à une distance donnée. On angule ici chaque caméra d’un angle α (voir schéma ci-dessous).
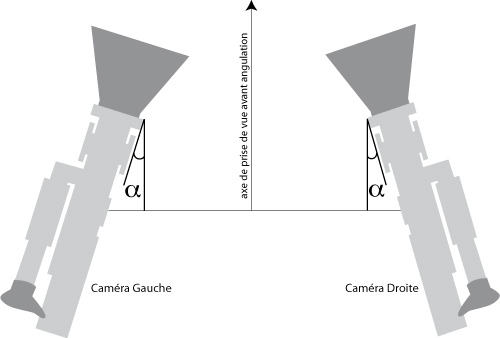
La formule qui permet de déterminer α est:
α = arctang (t/2*p)
p : distance du plan stéréo
t : distance entraxe
α : angle à appliquer à chacune des caméra
Explication mathématique en vidéo (appuyer sur pause si les explications défilent trop rapidement)
Remarque: l’application Stéréographer affiche l’angulation totale à appliquer ( 2 x α )